(2014/01/22) 由於組裝完成之後,X軸光桿有下垂的問題,而且是結構性問題,無法做有效的改善。因此,打算重新設計結構,再重新挑戰一次這種單端懸臂式的設計。新設計的機器命名為CraneRAP,開發過程請參考CraneRAP 3D印表機 開發記錄。

(2014/01/10) Z軸end stop還沒裝,就先急著開印了...

(2104/01/09) 擠出機構救依照原始設計先做囉~

(2104/01/09) 為了讓SmartRAP持續有進度,把組裝的工作交給同事處裡。

2014/01/3 暫時放棄塑膠滑套的構想,先繼續畫擠出機的夾具。

(2012/12/30) 參考蔣益民大大的建議,LM8UU滑套改用列印的。Z軸順利畫進列印件了,但是X軸的部分到處卡住。傷腦筋中
2013/12/27 plate_x印出來組裝,發現束帶的孔位太小,要再修改重印了~

2013/12/25 壞習慣,我又重頭做起了~
目前只畫好plate_x

(2013/12/25) X軸兩端零件安裝
整台機器的結構精簡到不行,十分鐘就可以裝好,難度超低,一點成就感都沒有...

(2013/12/25) Y軸兩端零件安裝
Y兩端也有新版的可以跟進。新版的有加入玻璃支撐架的功能。

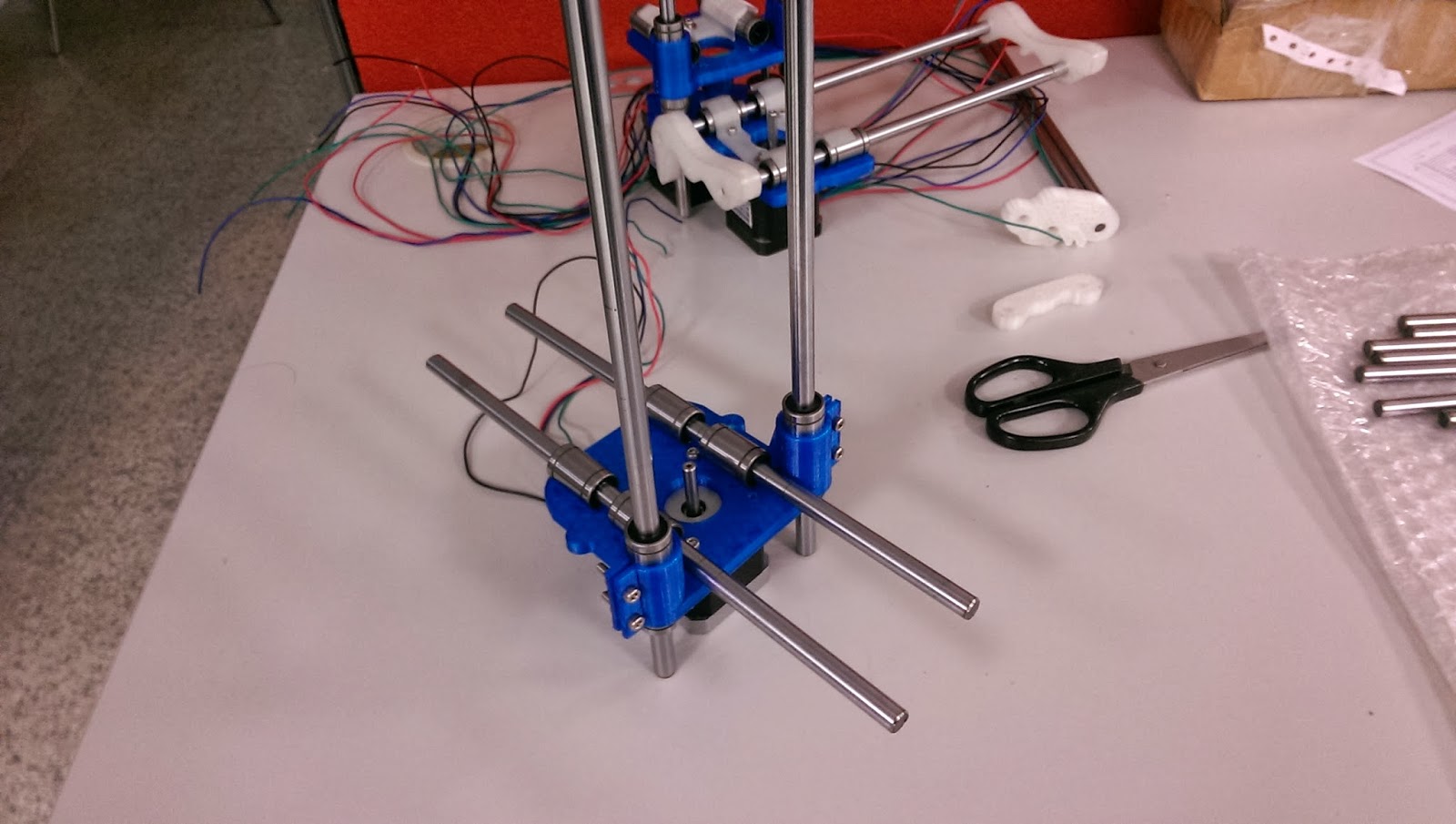
(2013/12/25) Y滑套、光軸組裝。

(2013/12/25) X軸滑套、光軸組裝,Z滑套、光軸組裝。幾天前原作者已經有發佈新的X基座,所以過陣子會拆卸下來跟上新版的。

2013/12/24 光軸、608zz、LM8UU到貨

2103/12/18 擠出齒輪到貨

2013/12/12 馬達組裝

2103/12/12 列印第二批零件

2013/12/11 列印第一批零件
為什麼您印出的零件好細緻喔~~有打磨過嗎?何種材質呢?
回覆刪除PLA列印的,沒有打磨過。層高0.2mm
刪除新年快樂!!
回覆刪除請問塑膠軸承的好處是什麼呢?
原本金屬的不好用嗎?
有新方法就嘗試看看囉~
刪除如果可以一體成型的話,又可以減少安裝步驟。
但是目前覺得列印出來的東西,有工差,跟光軸的咬合力量很難控制。
應該會暫時放棄這個構想。
請問X軸光桿有下垂的問題是指哪部分
回覆刪除我目前也在蒐集零件要組一台
很希望向您看齊
謝謝!
X軸(夾j head的那個軸),往外伸出的時候,j head 的高度會下垂。
刪除這樣是不是X軸不要裝太長比較能避免?
刪除有考慮過在 X 軸另一端增加配重解決嗎?
回覆刪除加配重是沒辦法解決問題的歐~
刪除更新一下亮宇兄的這台 SmartRap 近況,這台我後來拿回家用了(我是照片中坐著組裝那位,後來擠出頭持續卡住,所以換成 E3D ,又因為 Y 軸與 Z 軸間並非垂直 (機構設計問題,螺桿在 plate_x X軸後方往上頂,所以是歪的),所以我把 plate_x 繞 Z 軸旋轉 180 度用SmartRap自己印,因為原本印出來是歪斜的,所以這個反過來的 plate_x 也會是歪斜的(只是反過來),然後取代原本的 plate_x 裝上去,之後印出來的東西就比較垂直了 (還是離垂直差了約2度)。
回覆刪除因為 SmartRap 的機構問題,誠如亮宇所說 X 軸往前方伸展時,擠出頭會往下垂,就跟吊車一樣,只要一跑快,擠出頭就晃動的很厲害,如果放慢列印(20mm/s)以下,是可以緩解此問題,但仍會晃動,如果在每顆 LM8UU 上綁束現帶的話 ,應該可以改善一點 ...
SmartRap 的另一點是,需要的平面運作空間是本身的四倍大,(XY軸會往前後左右伸縮),但是可列印的空間卻少得可憐.
SmartRap 長寬約 30cm x 30cm ,運作的寬間需要 60cm x 60cm,可列印範圍 12cm x 10cm 。